I also am co-author in this paper that will be presented by one of my PhD students (nominated for the Best Safety, Security, and Rescue Robotics paper award):
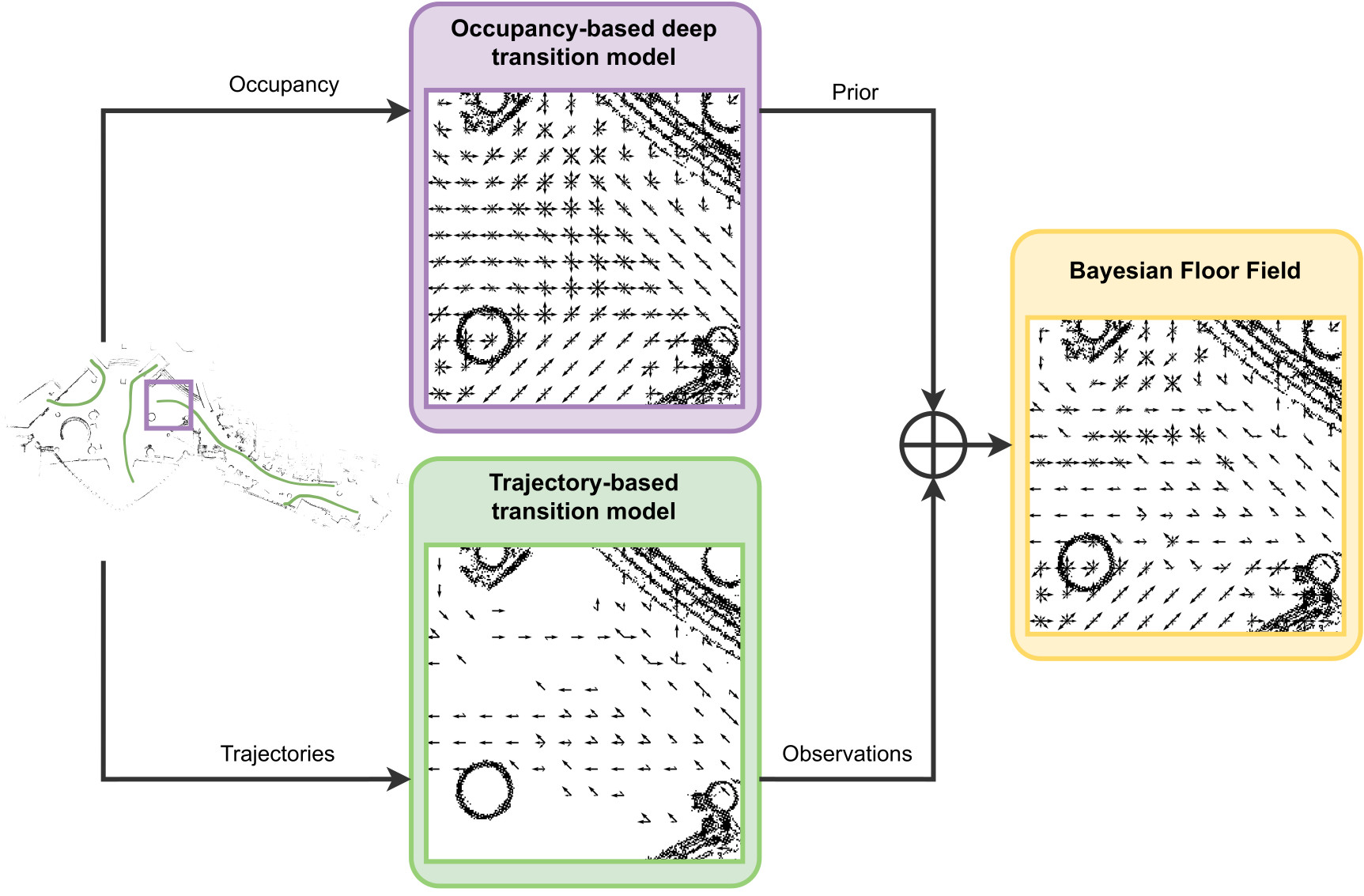
Mapping people dynamics is a crucial skill for robots, because it enables them to coexist in human-inhabited environments. However, learning a model of people dynamics is a time consuming process which requires observation of large amount of people moving in an environment. Moreover, approaches for mapping dynamics are unable to transfer the learned models across environments: each model is only able to describe the dynamics of the environment it has been built in. However, the impact of architectural geometry on people’s movement can be used to anticipate their patterns of dynamics, and recent work has looked into learning maps of dynamics from occupancy. So far however, approaches based on trajectories and those based on geometry have not been combined. In this work we propose a novel Bayesian approach to learn people dynamics able to combine knowledge about the environment geometry with observations from human trajectories. An occupancy-based deep prior is used to build an initial transition model without requiring any observations of pedestrian; the model is then updated when observations become available using Bayesian inference. We demonstrate the ability of our model to increase data efficiency and to generalize across real large-scale environments, which is unprecedented for maps of dynamics.
@inproceedings{202410_verdoja_bayesian,address={Abu Dhabi, UAE},title={Bayesian Floor Field: Transferring people flow predictions
across environments},doi={10.1109/IROS58592.2024.10802300},booktitle={2024 {IEEE}/{RSJ} {Int.}\ {Conf.}\ on {Intelligent} {Robots}
and {Systems} ({IROS})},publisher={IEEE},author={Verdoja, Francesco and Kucner, Tomasz Piotr and Kyrki, Ville},month=oct,year={2024},pages={12801--12807},}
IROS
Jointly Learning Cost and Constraints from Demonstrations for Safe Trajectory Generation
Shivam Chaubey, Francesco Verdoja, and Ville Kyrki
In 2024 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS), Oct 2024
Nominated for the Best Safety, Security, and Rescue Robotics Paper award sponsored by the International Rescue System Initiative (IRSI) at the 2024 IEEE/RSJ Int. Conf. on Intelligent Robots and Systems (IROS)
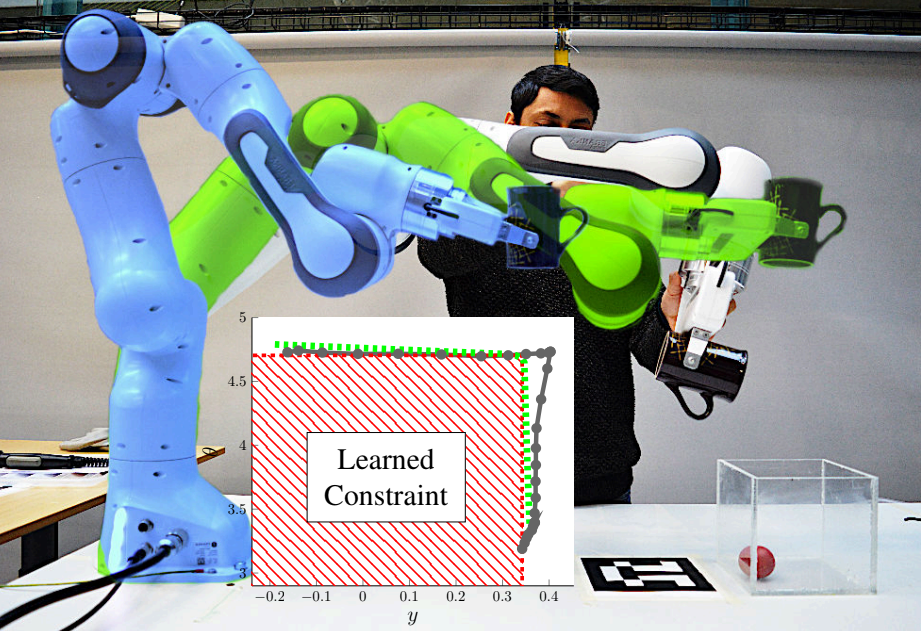
Learning from Demonstration allows robots to mimic human actions. However, these methods do not model constraints crucial to ensure safety of the learned skill. Moreover, even when explicitly modelling constraints, they rely on the assumption of a known cost function, which limits their practical usability for task with unknown cost. In this work we propose a two-step optimization process that allow to estimate cost and constraints by decoupling the learning of cost functions from the identification of unknown constraints within the demonstrated trajectories. Initially, we identify the cost function by isolating the effect of constraints on parts of the demonstrations. Subsequently, a constraint leaning method is used to identify the unknown constraints. Our approach is validated both on simulated trajectories and a real robotic manipulation task. Our experiments show the impact that incorrect cost estimation has on the learned constraints and illustrate how the proposed method is able to infer unknown constraints, such as obstacles, from demonstrated trajectories without any initial knowledge of the cost.
@inproceedings{202410_chaubey_jointly,address={Abu Dhabi, UAE},title={Jointly Learning Cost and Constraints from Demonstrations for
Safe Trajectory Generation},doi={10.1109/IROS58592.2024.10802533},booktitle={2024 {IEEE}/{RSJ} {Int.}\ {Conf.}\ on {Intelligent} {Robots}
and {Systems} ({IROS})},publisher={IEEE},author={Chaubey, Shivam and Verdoja, Francesco and Kyrki, Ville},month=oct,year={2024},pages={3635--3642},}