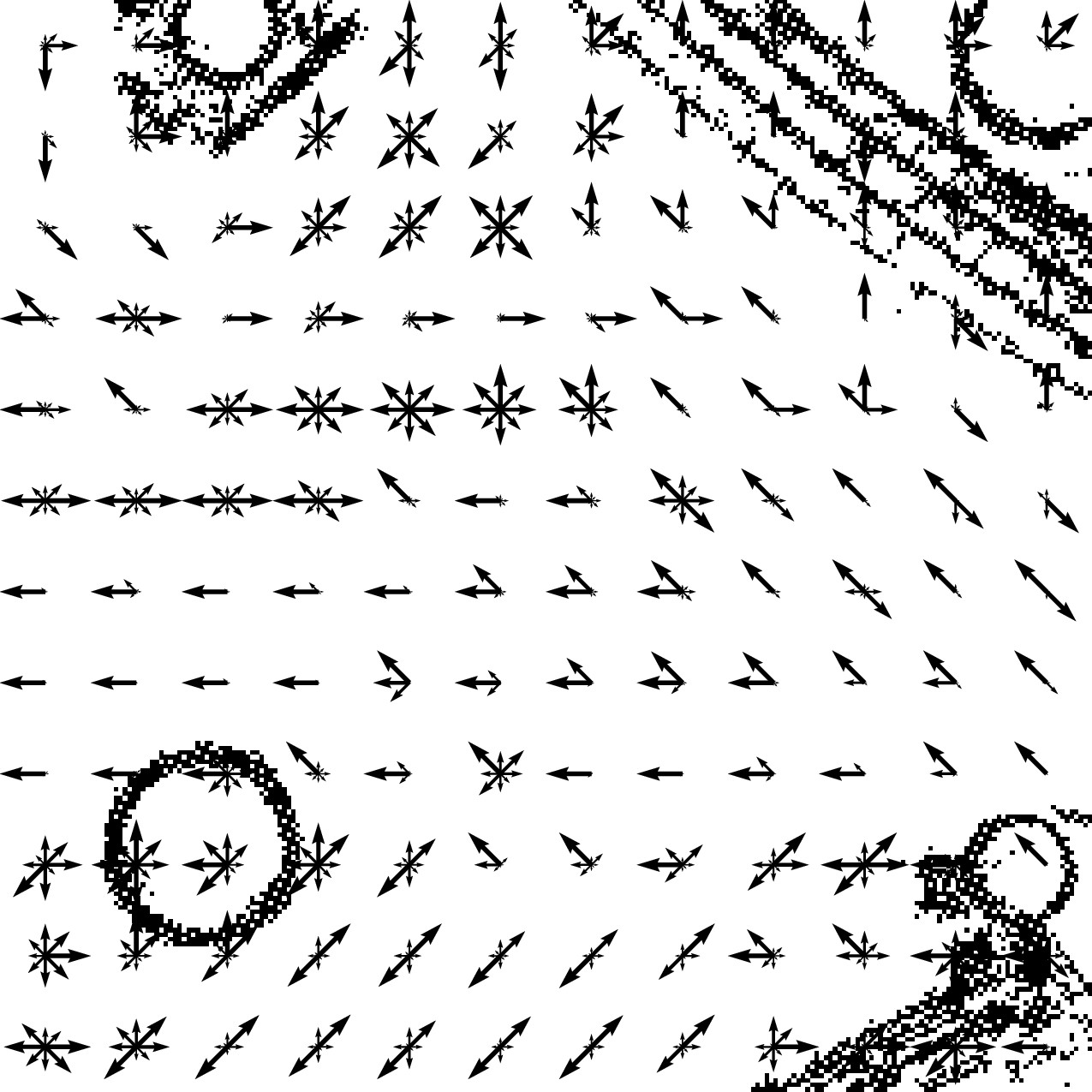
Mapping people dynamics is a crucial skill for robots, because it enables them to coexist in human-inhabited environments. However, learning a model of people dynamics is a time consuming process which requires observation of large amount of people moving in an environment. Moreover, approaches for mapping dynamics are unable to transfer the learned models across environments: each model is only able to describe the dynamics of the environment it has been built in. However, the impact of architectural geometry on people’s movement can be used to anticipate their patterns of dynamics, and recent work has looked into learning maps of dynamics from occupancy. So far however, approaches based on trajectories and those based on geometry have not been combined. In this work we propose a novel Bayesian approach to learn people dynamics able to combine knowledge about the environment geometry with observations from human trajectories. An occupancy-based deep prior is used to build an initial transition model without requiring any observations of pedestrian; the model is then updated when observations become available using Bayesian inference. We demonstrate the ability of our model to increase data efficiency and to generalize across real large-scale environments, which is unprecedented for maps of dynamics.
@online{202405_verdoja_using,title={Using occupancy priors to generalize people flow predictions},url={https://motionpredictionicra2024.github.io},author={Verdoja, Francesco and Kucner, Tomasz Piotr and Kyrki, Ville},month=may,year={2024},note={Presented at the ``Long-term Human Motion Prediction'' workshop
at the IEEE Int.\ Conf.\ on Robotics and Automation (ICRA)},}
ICRA
Modeling movable objects improves localization in dynamic environments
Matti Pekkanen, Francesco Verdoja, and Ville Kyrki
May 2024
Presented at the “Future of Construction: Lifelong Learning Robots in Changing Construction Sites” workshop at the IEEE Int. Conf. on Robotics and Automation (ICRA)
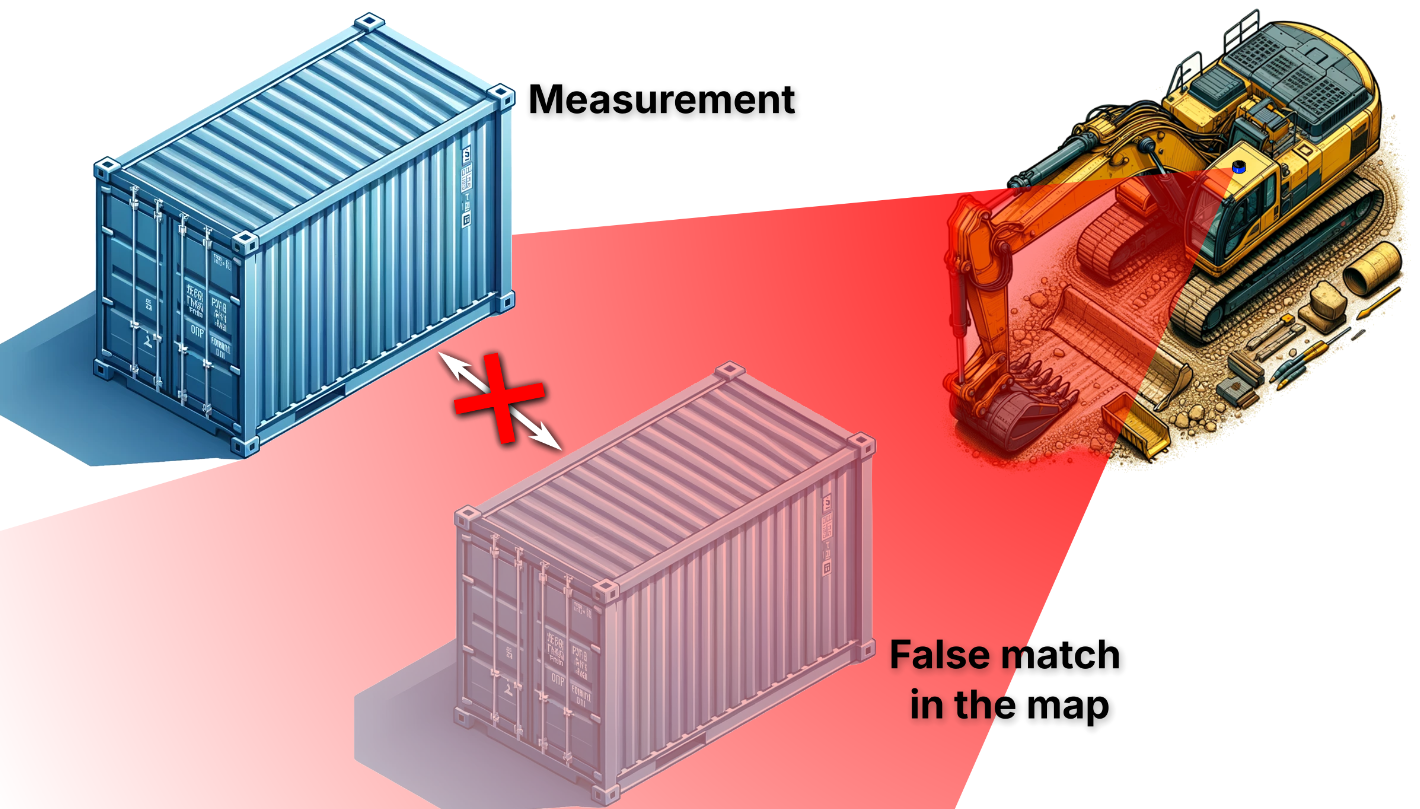
Most state-of-the-art robotic maps assume a static world; therefore, dynamic objects are filtered out of the measurements. However, this division ignores movable but non- moving, i.e., semi-static objects, which are usually recorded in the map and treated as static objects, violating the static world assumption and causing errors in the localization. This paper presents a method for modeling moving and movable objects to match the map and measurements consistently. This reduces the error resulting from inconsistent categorization and treatment of non-static measurements. A semantic segmentation network is used to categorize the measurements into static and semi- static classes, and a background subtraction-based filtering method is used to remove dynamic measurements. Experimental comparison against a state-of-the-art baseline solution using real-world data from the Oxford Radar RobotCar data set shows that consistent assumptions over dynamics increase localization accuracy.
@online{202405_pekkanen_modeling,title={Modeling movable objects improves localization in dynamic
environments},url={https://construction-robots.github.io},author={Pekkanen, Matti and Verdoja, Francesco and Kyrki, Ville},month=may,year={2024},note={Presented at the ``Future of Construction: Lifelong Learning
Robots in Changing Construction Sites'' workshop at the IEEE
Int.\ Conf.\ on Robotics and Automation (ICRA)},}
ICRA
Evaluating the quality of robotic visual-language maps
Matti Pekkanen, Tsvetomila Mihaylova, Francesco Verdoja, and Ville Kyrki
May 2024
Presented at the “Vision-Language Models for Navigation and Manipulation (VLMNM)” workshop at the IEEE Int. Conf. on Robotics and Automation (ICRA)
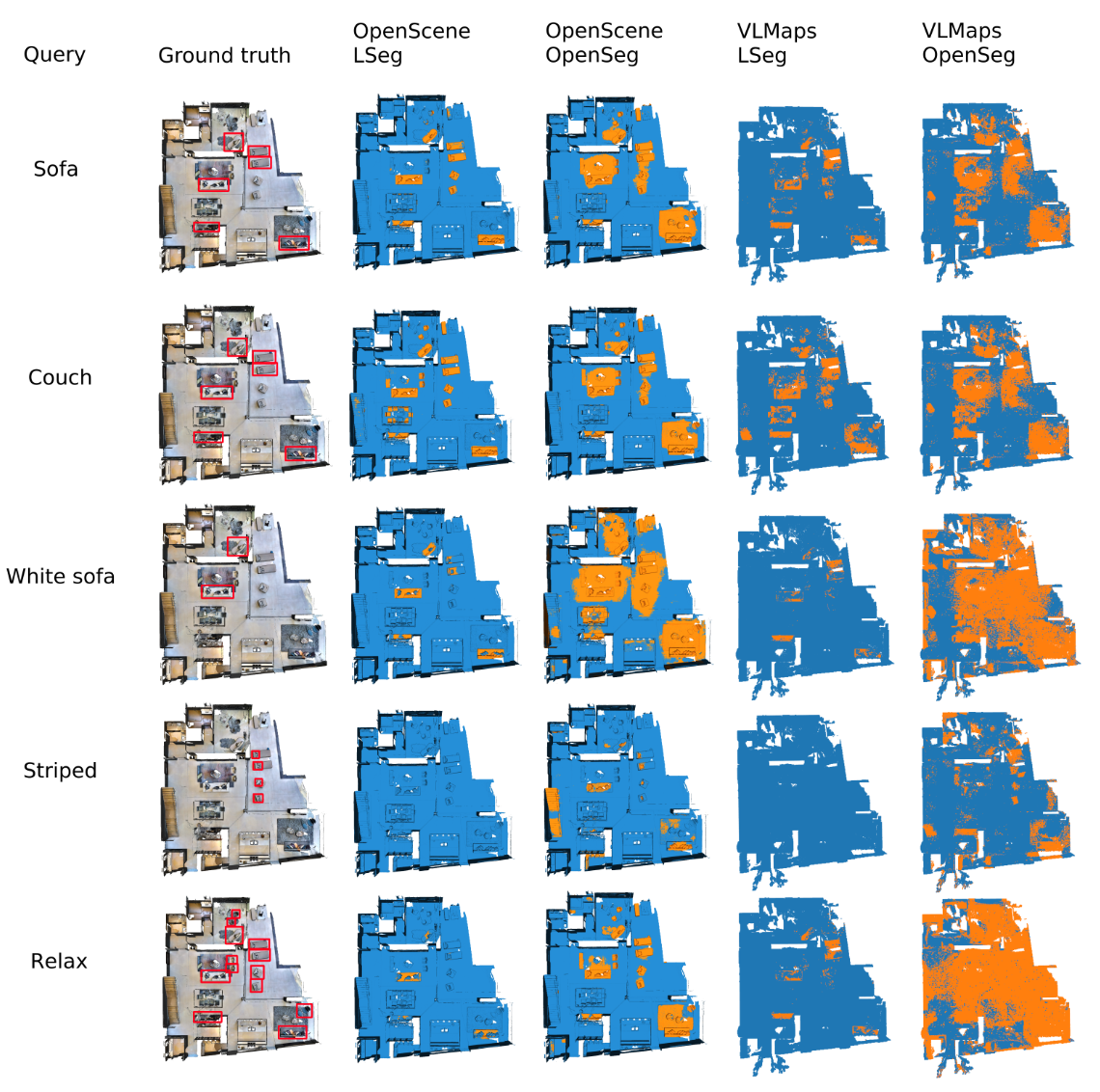
Visual-language models (VLMs) have recently been introduced in robotic mapping by using the latent representations, i.e., embeddings, of the VLMs to represent the natural language semantics in the map. The main benefit is moving beyond a small set of human-created labels toward open-vocabulary scene understanding. While there is anecdotal evidence that maps built this way support downstream tasks, such as navigation, rigorous analysis of the quality of the maps using these embeddings is lacking. In this paper, we propose a way to analyze the quality of maps created using VLMs by evaluating two critical properties: queryability and consistency. We demonstrate the proposed method by evaluating the maps created by two state-of-the-art methods, VLMaps and OpenScene, using two encoders, LSeg and OpenSeg, using real-world data from the Matterport3D data set. We find that OpenScene outperforms VLMaps with both encoders, and LSeg outperforms OpenSeg with both methods.
@online{202405_pekkanen_evaluating,title={Evaluating the quality of robotic visual-language maps},url={https://vlmnm-workshop.github.io},author={Pekkanen, Matti and Mihaylova, Tsvetomila and Verdoja, Francesco and Kyrki, Ville},month=may,year={2024},note={Presented at the ``Vision-Language Models for Navigation and
Manipulation (VLMNM)'' workshop at the IEEE Int.\ Conf.\ on
Robotics and Automation (ICRA)},}
ICRA
Jointly Learning Cost and Constraints from Demonstrations for Safe Trajectory Generation
Shivam Chaubey, Francesco Verdoja, and Ville Kyrki
May 2024
Presented at the “Towards Collaborative Partners: Design, Shared Control, and Robot Learning for Physical Human-Robot Interaction (pHRI)” workshop at the IEEE Int. Conf. on Robotics and Automation (ICRA)
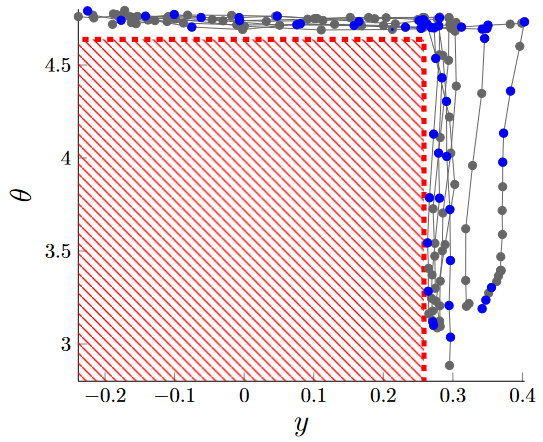
Learning from Demonstration (LfD) allows robots to mimic human actions. However, these methods do not model constraints crucial to ensure safety of the learned skill. Moreover, even when explicitly modelling constraints, they rely on the assumption of a known cost function, which limits their practical usability for task with unknown cost. In this work we propose a two-step optimization process that allow to estimate cost and constraints by decoupling the learning of cost functions from the identification of unknown constraints within the demonstrated trajectories. Initially, we identify the cost function by isolating the effect of constraints on parts of the demonstrations. Subsequently, a constraint leaning method is used to identify the unknown constraints. Our approach is validated both on simulated trajectories and a real robotic manipulation task. Our experiments show the impact that incorrect cost estimation has on the learned constraints and illustrate how the proposed method is able to infer unknown constraints, such as obstacles, from demonstrated trajectories without any initial knowledge of the cost.
@online{202405_chaubey_jointly,title={Jointly Learning Cost and Constraints from Demonstrations for
Safe Trajectory Generation},url={https://sites.google.com/view/icra24-physical-hri},author={Chaubey, Shivam and Verdoja, Francesco and Kyrki, Ville},month=may,year={2024},note={Presented at the ``Towards Collaborative Partners: Design,
Shared Control, and Robot Learning for Physical Human-Robot
Interaction (pHRI)'' workshop at the IEEE Int.\ Conf.\ on
Robotics and Automation (ICRA)},}
 Jointly Learning Cost and Constraints from Demonstrations for Safe Trajectory GenerationMay 2024Presented at the “Towards Collaborative Partners: Design, Shared Control, and Robot Learning for Physical Human-Robot Interaction (pHRI)” workshop at the IEEE Int. Conf. on Robotics and Automation (ICRA)
Jointly Learning Cost and Constraints from Demonstrations for Safe Trajectory GenerationMay 2024Presented at the “Towards Collaborative Partners: Design, Shared Control, and Robot Learning for Physical Human-Robot Interaction (pHRI)” workshop at the IEEE Int. Conf. on Robotics and Automation (ICRA)